Muscoli artificiali robotici più efficienti: nello studio anche la Scuola Sant'Anna
Un metodo inedito per progettare nuovi attuatori di movimento soft e muscoli artificiali robotici dalle prestazioni potenziate e dal consumo energetico assai ridotto, basandosi soltanto su sinergie, finora sconosciute, tra proprietà di materiali diversi, è stato sviluppato nell’ambito di una collaborazione fra gruppi di ricerca internazionali, quelli di Marco Fontana, docente di Meccanica applicata alle macchine dell’Istituto di Intelligenza Meccanica della Scuola Superiore Sant’Anna di Pisa, e di Martin Kaltenbrunner, docente di Fisica della Materia dell’Università Johannes Kepler di Linz. I risultati, che hanno portato allo sviluppo di questo nuovo metodo per creare muscoli artificiali più stabili ed efficienti, sono stati appena pubblicati sulla rivista scientifica Nature Electronics.
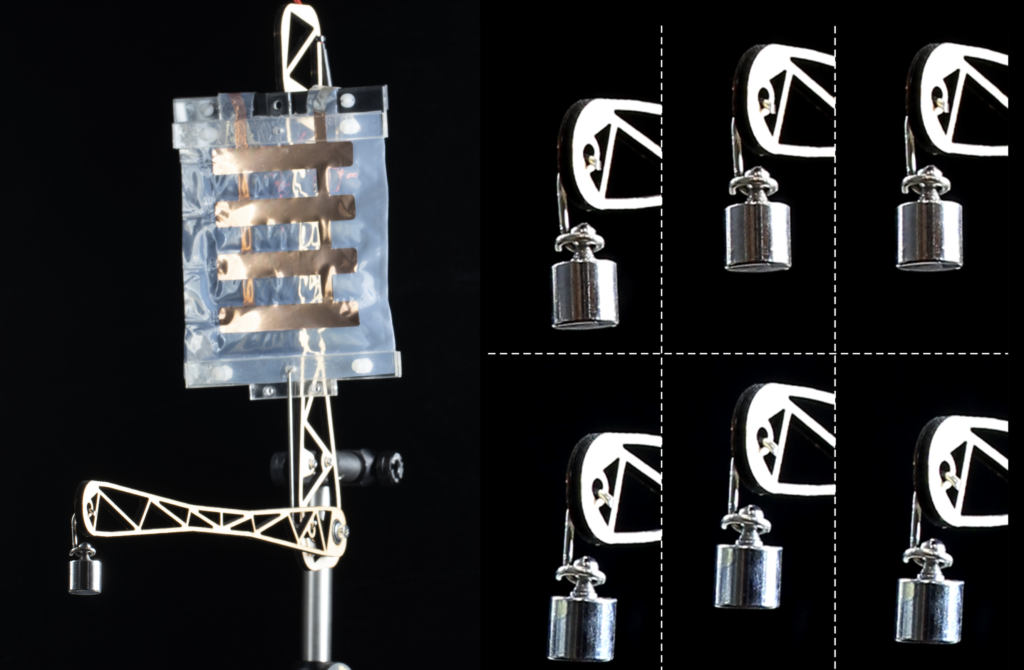
Gli attuatori, che consentono di sfruttare energia elettrica per generare movimento o forza svolgono un ruolo cruciale nella vita quotidiana, sebbene passino spesso inosservati. Gli attuatori basati su materiali soft in particolare, negli ultimi anni, hanno attirato l’attenzione della comunità scientifica grazie al loro peso ridotto, al funzionamento silenzioso e alla biodegradabilità. Un modo semplice per creare attuatori soft consiste nell'utilizzare strutture multimateriale, come "tasche" fatte di film plastici flessibili riempite di oli e ricoperte con plastiche conduttive. Quando viene applicata un’attivazione elettrica, il film sposta il fluido e fa contrarre la tasca, in maniera simile a un muscolo biologico. Questo sistema può essere utilizzato per costruire muscoli artificiali per robot, ottiche regolabili o superfici tattili. Finora l'applicazione di una attivazione elettrica costante consentiva solo di ottenere contrazioni del muscolo per un periodo breve di tempo: un limite notevole per la loro applicazione pratica.
Il ricercatore della Scuola Superiore Sant’Anna Ion-Dan Sîrbu, ex dottorando dell’Università di Trento sotto la supervisione del ricercatore del Dipartimento di Ingegneria industriale dell’Università di Trento Giacomo Moretti e Marco Fontana, ha iniziato a fare ricerca su questo fenomeno durante un periodo di ricerca presso l'Università Johannes Kepler di Linz. Insieme al gruppo austriaco, Ion-Dan Sîrbu ha creato un sistema che permette una misura accurata della forza in questi attuatori. "Durante la mia ricerca – spiega Ion-Dan Sîrbu - su combinazioni di materiali comuni, ho anche provato un film plastico che un collega dottorando, David Preninger, ha utilizzato per il suo lavoro su muscoli artificiali biodegradabili. Non appena abbiamo notato che questo materiale è in grado di sostenere una forza costante per tempi arbitrariamente lunghi, ci siamo resi subito conto di aver fatto una scoperta importante".
Da quel momento, i ricercatori hanno lavorato su un modello teorico e su una caratterizzazione approfondita di materiali diversi. È emerso che i principali risultati sperimentali possono essere descritti con cura utilizzando modelli semplici.
"La bellezza del nostro modello è che è semplicissimo, può essere spiegato con conoscenze di fisica delle scuole superiori, e inoltre non è limitato agli attuatori oggi esistenti, ma riteniamo che i nostri risultati forniranno alla comunità scientifica uno strumento semplice e potente per progettare e indagare su nuovi sistemi", dice David Preninger, co-primo autore dell'articolo e dottorando presso il Dipartimento di Fisica della Materia Morbida dell'Università Johannes Kepler di Linz, descrivendo la ricerca pubblicata su Nature Electronics. "Il dato interessante è che non soltanto siamo riusciti rendere queste tecnologia molto più usabile ma il nostro studio permette di identificare combinazioni di materiali che portano a un consumo di energia fino a mille volte inferiore", aggiunge Martin Kaltenbrunner.
Utilizzando le combinazioni di materiali identificate, gli scienziati sono riusciti a sviluppare e operare con successo diversi tipi di muscoli artificiali, ottiche a gradazione variabile e display tattili. "La comprensione dei meccanismi fondamentali alla base degli attuatori soft creata da questo studio – sottolinea Marco Fontana, docente dell’Istituto di Intelligenza Meccanica della Scuola Superiore Sant’Anna – ha il potenziale per creare un notevole salto avanti nel campo dei dispositivi assistivi, delle macchine automatiche e dei robot mobili per l'esplorazione terrestre, marina e spaziale. Tutti questi settori sono alla ricerca di soluzioni a basso costo e alte prestazioni, ma anche e soprattutto in grado di garantire bassi consumi e impatti ambientali che le rendano sostenibili".
Fonte: Scuola Superiore Sant'Anna - Ufficio stampa